Part IV - The Step Model and Footfall Plots
5. Plotting Results
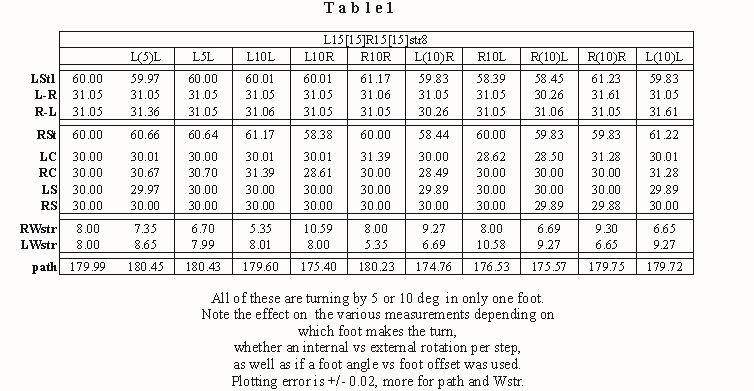
Error +/- 0.02” (approx. 1
1/4 sixty fourths of an inch). All the error is from plotting, since all
measures are fixed or calculated values.
Some deviations are small
but "exact". A difference of 0.04” is real. All lines are in inches and all
angles in degrees.
Tables such as the ones below make it easier to
compare the changes in each measurement caused by one or more specific
parameter changes. This should be useful for computer modeling and the
production of correlation tables, as well as to highlight the potentially
great variability in gait which gives rise to similar overall patterns. All
plots have 0 pelvic-stretch and no aberrations.
6. Plotting Results Analysis
Note: Some
conclusions are from data not shown.
- Step-line
- Different step-lines for the left vs right feet do not cause
turns.
- Step-line is decreased by foot offset, the same for CW and CCW
rotation.
- Stride-line
- Stride-line for the other foot increases with external rotations
per step, and decreases with internal.
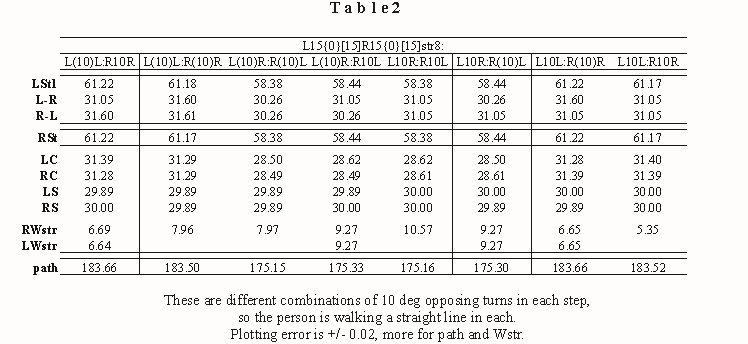
- A person can be turning with every step, but still walking
straight.
- Measured equality of stride-line doesn't mean the person is
walking straight. Non-compensating foot offsets
cause an extra
angular path shift, even though the left and right stride-lines are
the same.
- L/R-line
- Changing straddle, step-out or rear-leg lines, pelvic stretch
and/or foot offset changes L/R-line.
- Foot offset is shown in the forward foot. ie. if the left foot
had a foot offset left, the L/R-line wouldn’t change,
but the
R/L-line changes.
- Shorter step-line is shown in the forward foot. ie. if the left
foot had a shorter step-line, the L/R-line wouldn’t change, but the
R/L-line would decrease.
- Foot and push-off angles do not change the L/R-line (So, angles
vs. offset rotations have a different effect on the L/R-line.)
- Walking-straddle
- For foot angles: 1) inside turns increase, and 2) outside turns
decrease the walking-straddle for the other foot. Foot angle doesn't
change the Wstr for the same foot.
- For foot offset: 1) inside turns decrease the walking-straddle
for the same foot, and increase it for the other foot, and 2)
outside turns do the opposite.
- Foot angle changes the walking-straddle by twice as much as the
equivalent angular change as foot offset, for the range of values
used here. 1 deg of foot angle changes the other foot's
walking-straddle by 0.26", while one degree leg angle of foot offset
changes both walking-straddles by 0.13".
|
Changes to Wstr for L15{0}[15]R15{0}[15] |
| |
|
same foot |
other foot |
| foot angle: |
outside turn |
0 decr. |
0.26/deg |
| |
inside turn |
0 incr. |
0.26/deg |
| foot offset: |
outside turn |
incr. 0.13/deg |
decr. 0.13/deg |
| |
inside turn |
decr.
0.13/deg |
incr.
0.13/deg |
- Wstr variations are cumulative.
For
L15{0}[15]R15{0}[15]str8:L(5)L-5L:R10R; from standard plots, LWstr =
RWstr = 6.02. Walking "straight", both feet outside turns. Extra
angular shift left due to the foot offset.
| |
|
RWstr |
LWstr |
| str |
|
8.00 |
8.00 |
| From left step |
(5)L |
-0.65 |
+0.65 |
| |
5L |
-1.3 |
0 |
| From right
step |
10R |
0 |
-2.6 |
| |
|
6.05 |
6.05 |
For L15{0}[15]R15{0}[15]str8:L10L:R10R; from standard plots,
LWstr = RWstr = 5.35. Walking "straight", both feet outside turns.
| |
|
RWstr |
LWstr |
| str |
|
8.00 |
8.00 |
| From left step |
10L |
-2.6 |
0 |
| From right
step |
10R |
0 |
-2.6 |
| |
|
5.4 |
5.4 |
For L15{0}[15]R15{0}[15]str8:L(10)R; from standard plots, RWstr
= 9.27, LWstr = 6.69.
Inside turn of 10 deg right (CW) with every
left step. Extra angular shift right with every left step due to the
foot offset.
| |
|
RWstr |
LWstr |
| str |
|
8.00 |
8.00 |
| From left step |
10R |
+1.3 |
-1.3 |
| From right
step |
0 |
0 |
-2.6 |
| |
|
9.3 |
6.7 |
- Etc, etc
Previous
Next
|

